제품
MUM-T 자율차량
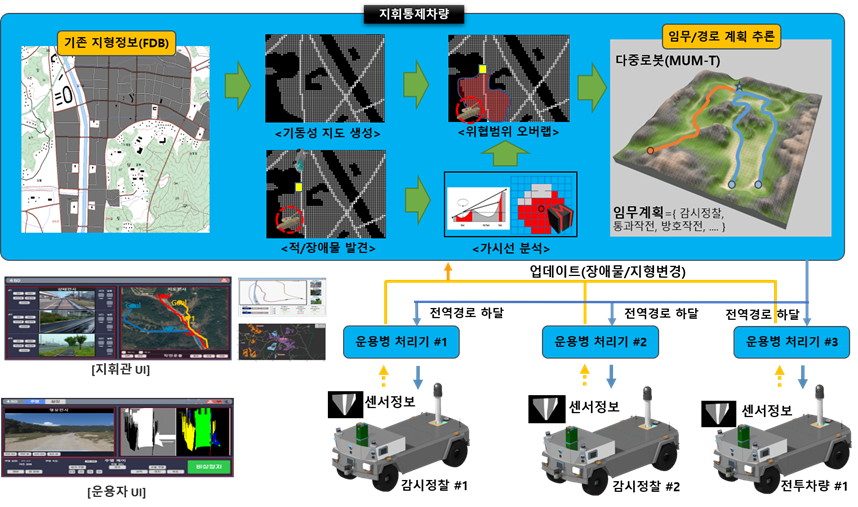
당사는 국방기술과제를 통하여 기본적으로 단위 자율플랫폼의 제품을 확보하고 있으며, 이를 기반으로 다중로봇(MUM-T)의 운용을 위한 클라우드기반의 지능형 학습/추론 엔진을 개발중에 있다. 본 기술 개발을 통하여 지금까지 단위차량의 자율기술을 확보하는 수준을 넘어 다른 종류의 무인차량 3대 혹은 배속 확장이 가능한 형태의 다중로봇 자율기술을 개발중에 있다. 본 연구에서는 특히 사용군이 실제 운용을 위하여 필요로 하는 다양한 다중협력 임무계획을 수동 혹은 자동으로 실행하는 임무계획 알고리즘이 개발되고 있다.
지금까지의 기술과 차별화되는 부분은 수동임무를 각 운용자가 수행하거나 스위치하는 수준이 아니라 임무만 정의하고 나머지 임무를 수행하기 위한 3D환경의 기동까지도 자율로 수행하게 하는 것이다. 특히 운용자가 긴급한 상태에서 모두 자율로 임무를 수행하는 도중에 원격제어기반의 수동탈취를 수행한 경우에도 통합적으로 자율임무를 포함하여 모든 임무를 연합하여 수정임무계획을 수행하는 등의 기능이 기존의 연구와는 차별화되는 부분이다.
본 다중로봇의 경우 기존의 연구와 차별화되는 또 다른 분야는 기존에 사전정보로 확보된 지도를 활용하나 단위 차량에서 확보된 환경인식의 정보를 차량간에도 융합하여 성능을 증대하는 부분과 단위차량에서도 센서간의 융합을 통하여 성능을 증대하는 부분에서 외부 악환경 등의 다양한 변화를 딥러닝기반으로 새로이 인식하여 적응하는 기술의 개발이 포함되어 개발되고 있는 것이다.